3) El COMPUTADOR
DE RUMBO es un pequeño ordenador en el que el fabricante
ha instalado un programa específico para controlar el rumbo. Aunque
los fabricantes lo venden como equipos de alta sofisticación y por
tanto elevados precios, en realidad el hardware es relativamente
sencillo y consiste en un pequeño ordenador alimentado a 12 voltios
que suele correr un sistema operativo “capado” y en el cual se ha
instalado un software desarrollado por el fabricante que computa
todos los "inputs" para dar lugar a una salida de control sobre
el timón.

Sencillo de
decir, pero complicado y laborioso de programar y por tanto a
amortizar su desarrollo en las cifras de ventas previstas por el
fabricante. El computador de rumbo entrega como resultado una salida
a unos transistores de potencia a cuyas salidas habremos de conectar
el motor del actuador, o enchufar las salidas a un par de
electroválvulas de la bomba electrohidráulica que mueve el pistón
hidráulico que actúa sobre el eje del timón.
Además esta
unidad de control llevará en muchos casos una salida conocida como
“Clutch” o embrague que permite desembragar el piloto cuando
pulsamos el botón “Stand-by” de nuestro panel de pilotaje. El
embrague puede actuar de diferentes maneras dependiendo del tipo de
actuador que lleve instalado nuestro barco. Si es mecánico en muchas
ocasiones de trata de un sencillo electroimán que ‘pega’ o desplaza
un rodamiento dentro de una configuración de engranajes planetarios
o epicicloidales.
4) La UNIDAD DE POTENCIA, también
conocida como "Drive-Unit" que puede ser un motor eléctrico que
mueve el eje del timón en el caso de un timón de caña, o un motor
que actúa sobre un pistón conectado mecánicamente al eje del timón,
o una bomba hidráulica con dos electroválvulas que permitan dirigir
el aceite para desplazar el pitón en uno u otro sentido.
También suele
existir otros sensores en los equipos más sofisticados como son el
sensor de viento para permitir hacer navegaciones en piloto
automático pero referenciadas al ángulo de viento que queramos, o el
girocompás que es un sofisticado acelerómetro en 3 ejes que informa
de forma instantánea a la unidad de control, sobre las posibles
guiñadas, cabeceos o cambios de posición del barco debido al
movimiento de las olas.

Naturalmente la
práctica totalidad de pilotos automáticos también reciben posición
GPS por la red de datos o simplemente integran un chip GPS para, a
partir de la evolución de las coordenadas poder calcular rumbo gps y
velocidad, e integrar estos datos en el programa que finamente dará
como resultado un ajuste continuo y fino sobre la pala del timón del
barco.
Algún equipo de
piloto automático más sofisticado incluso tiene salidas de control
para manejar la hélice de proa… ¿Hélice de proa? Así es. El equipo
es capaz de mantener el barco a un rumbo, por ejemplo al viento,
parado, cuando dejamos el velero aproado para subir o bajar la mayor,
incluso sin ninguna arrancada controlando para ello la hélice de
proa.
Un
manejo muy sencillo
Al margen de un
montón de modos avanzados, ajustes y otras "virguerías" propios de
cada sistema, su manejo es trivial. Ponemos el barco al rumbo
deseado, pulsamos el botón AUTO y ya está. Ahora podemos soltar el
timón y ver como el barco va solito navegando a destino de forma
incansable. Observamos como la rueda o caña se va moviendo
efectuando pequeñas correcciones respondiendo a las condiciones de
la mar.
Al lado del botón
AUTO, veremos otro de mismo tamaño e importancia en el que suele
poner STANDBY, y que al ser pulsado hace regresar al barco al modo
manual, en el que debemos llevar nosotros el gobierno.

Llega el mal tiempo y con él los problemas
Cuando la mar se
levanta, y a nosotros como timoneles nos cuesta mantener el rumbo,
el piloto automático tampoco lo va a tener fácil. Tan es así que
cuando ya estemos con una fuerte marejada o temporal, el piloto
automático lo puede hacer tan mal, que debamos coger nosotros el
timón y pasar el modo STAND-BY.
A diferencia de
un piloto de viento que actúa sobre el timón de forma mecánica y con
mayor fuerza cuanto mayor sea el viento, la unidad de potencia
(Drive-Unit) tiene que trabajar muy duro cuando suben las
condiciones meteorológicas. Cuando el sistema o bien no tiene la
potencia suficiente para mover el eje del timón, o la velocidad con
que ha de actuar no es la suficiente, el piloto automático no está a
la altura de las circunstancias. Intenta corregir y antes de
lograrlo, ya ha llegado otro golpe de mar que le debería obligar a
actuar en sentido contrario, conduciendo a una situación de control
caótica.

El problema no
está en el computador de rumbo, es un problema de la unidad de
potencia. Con un buen dimensionamiento de la unidad de potencia,
Ésta debería actuar la mayor parte del tiempo, digamos que un 80%
del tiempo, empleando no más de un 10% de su máxima potencia.
Solo un 1% del
tiempo debería verse sometida a entregar su máximo esfuerzo. Si no
es así hemos montado una unidad de potencia demasiado pequeña.
Navegando con el mar como un espejo, la potencia necesaria para
mover el timón no tiene mucha importancia porque cualquier pequeña
energía será suficiente ya que las correcciones son muy buenas. Pero
con mal tiempo….

Piloto automático con mal tiempo
En esos momentos
es donde comprobamos si el sistema que llevamos instalado da o no la
talla. Si su barco es oceánico o prevé cruzar océanos, debemos
prestar mucha atención al conjunto que forma la unidad de potencia y
si es necesario, sustituirla o reforzarla para que sea capaz de
lidiar con olas potentes.
Estos trabajos
son complicados, y a veces imposibles en los rincones remotos del
planeta, y por ello más vale salir de viaje con los deberes bien
hechos. Someter la unidad de potencia durante mucho tiempo a mucho
esfuerzo es sinónimo de averías. Por esta razón, si planea un largo
viaje, no está de más en pensar llevar repuestos de, por ejemplo, el
computador de navegación que es por donde suelen fallar los pilotos
además del motor de la unidad de potencia.

Pero
estas también se suelen producir por otras causas que nada tienen
que ver con el mal tiempo, como por ejemplo fallos de aislamiento,
humedad en los circuitos, agua salada que salpica sobre la bomba
hidráulica, corrosión en los sistemas mecánicos de la unidad de
potencia, o fallos de aislamiento o roturas en los cables eléctricos
que en algunos casos andan sueltos por los tambuchos al haber sido
instalados por operarios más chapucillas de lo deseado.
En demasiadas
ocasiones he observado como el computador de navegación ha sido
instalado en el interior de los cofres de popa. Es un error común e
imperdonable tanto a instaladores como a astilleros de barcos de
serie. Efectivamente en muchos casos he visto como esta práctica la
llevan a cabo los astilleros de serie.

Estos equipos son
sofisticados por llevan placas electrónicas delicadas. Por mucho que
los fabricantes los intenten hacer duros y "rugerizados", la humedad
les viene fatal. Por ello es muy incorrecto instalarlos en el
interior de los cofres de popa donde reciben muchísima más “dosis”
de humedad que en el interior del barco y por tanto los problemas
futuros están garantizados. Lo adecuado es montarlos en algún lugar
de los camarotes de popa, en el interior del barco en donde las
condiciones de humedad y cambio de temperatura son mucho más
adecuadas. De modo que ya sabe donde debe montar el nuevo equipo o
cambiar su ubicación en un par de horas de bricolaje marino.
Instalar la unidad de potencia adecuada
Lo primero que
debemos saber es el desplazamiento y eslora de nuestro barco para
calibrar el modelo adecuado a nuestra embarcación. Tenga presente
que cuando vamos a equipar y avituallar el barco para un largo
crucero, no es raro incrementar el peso hasta en un 20% respecto al
peso de tablas que indica el fabricante...
Con estos datos
nos iremos a las tablas que proponen los fabricantes. A partir de
ello podemos decidirnos por un modelo mayor o menor dependiendo de
otras características de nuestro barco. Si el barco es de quilla
profunda o quilla corrida y por tanto más estable, si nuestro barco
tiene un timón "duro", si tiene un plano vélico muy bien
equilibrado, o por el contrario es demasiado ardiente o blando…
Estos factores deben ser tenidos en cuenta a la hora de decidirse
por el modelo más adecuado.

En veleros
pequeños y con posibilidad de montar un piloto de caña, debemos
tener presente cual es el recorrido de embolo y en algunos casos
montar un prolongador si fuera necesario. Por descontado que los
sistemas hidráulicos tiene más potencia y por tanto si su barco lo
permite y está en la indecisión, debe escoger un sistema con bomba
electro-hidráulica y pistón hidráulico.
En Fondear le
brindamos la asesoría necesaria para conocer el equipo más adecuado.
(Asesoría Fondear Telf: 607 999 090)
La
velocidad de respuesta
Al final la
capacidad de responder rápidamente frente a un cambio implica
potencia. Y esta es muy necesaria si por ejemplo navegamos de
empopada con el Genaker, el Spi o un nuevo código cero inflado a una
de las bandas. Navegar con alisios y el piloto automático requiere
correcciones rápidas pues en caso contrario podríamos acabar con el
barco atravesado a la mar y en el mejor de los casos llevarnos un
gran susto en el cuerpo. La velocidad en la respuesta del piloto lo
es todo.
En un barco de
motor, la respuesta rápida del piloto automático especialmente con
mares de popa es también muy importante para evitar que el barco se
ponga a sobre controlar y llegue a perder la sincronía del
movimiento de las olas y nos origine una situación peligrosa si
navegamos en planeo y a importantes velocidades.
Lo importante es
saber el número de grados que el piloto es capaz de corregir por
segundo. En barcos de hasta 7 metros un valor de 15º por segundo
está bien. En un velero de 12 metros 10º por segundo es correcto, y
en un yate de 70’’ podemos conformarnos con 5º por seg. Pero cuando
el piloto se encuentra trabajando con máxima carga estas cifras
podrían caer de forma significativa y debemos asegurar que no lo
hagan incluso con mares enérgicos.

El
actuador
En los pilotos
más sencillos y económicos los hay con un embolo movido por un motor
eléctrico que empuja la caña del timón o con un motor eléctrico que
actúa sobre la misma rueda de gobierno. Tiene un embrague que libera
el automatismo para que podamos seguir gobernando en modo manual
cuando así lo deseemos.
Este mecanismo de
embrague está casi siempre actuado por un electroimán que consume
corriente nada despreciable cuando llevamos el barco en AUTO. Cuando
el barco trabaja haciendo muchas correcciones con mar cargada este
consumo es pequeño respecto a la corriente consumida por el motor
del actuador.
Pero cuando
navegamos en calma con poco viento o a motor con el mar como una
balsa, el motor del actuador casi nunca consume, al contrario que el
electroimán del embrague (Clutch) que no para de chupar amperios.
Durante muchas horas de navegación o incluso jornadas enteras en
modo auto, el consumo del piloto proviene en parte apreciable del
electroimán del embrague. Y aunque los fabricantes no han trabajado
(por increíble que parezca) en este importante asunto del consumo,
existen soluciones al respecto. La clave está en que una vez que el
electroimán ha "pegado" el rodamiento planetario de bloqueo, podemos
bajar el consumo del electroimán de forma drástica sin que este se
despegue. Es común seguir esta práctica en mucha maquinaria
industrial, y no sólo por el consumo, sino por reducción del calor a
disipar y por longevidad del equipo.
|
CONTROLAR
LOS AMPERIOS CONSUMIDOS POR EL PILOTO
Para disminuir el consumo
del piloto automático, existe un dispositivo electrónico que
tras unas décimas de segundo y tras la activación del modo
AUTO, baja la corriente del embrague sin que este se despegue
y por tanto consigue disminuir el consumo total operativo del
piloto automático.
Más información
en Fondear.com (Telf: 607 99 90 90)
|
Otros
controladores son simplemente un motor eléctrico con una reductora
que mueve una rueda dentada que actúa a su vez sobre una corredera
mecánica que se encarga de mover el eje del timón.
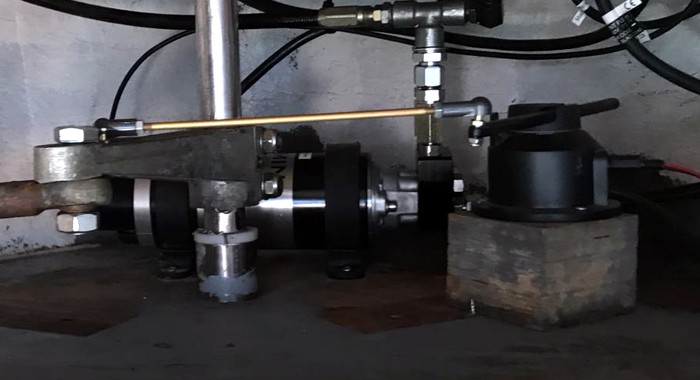
Sin embargo los
más eficaces son las unidades hidráulicas que montan un pistón de
aceite del que salen tres manguitos de alta presión por los que
circula aceite bombeado por una electrobomba hidráulica que actúa
junto con un par de electroválvulas.
Elegir el sistema hidráulico
Lo principal es
determinar el tamaño del pistón hidráulico que actuará directamente
sobre el eje del timón o sobre una leva montada en el sector del
timón. Cuanto más grande, mayor será la capacidad de aceite del
pitón y mayor potencia debe tener el grupo hidráulico utilizado.
Los fabricantes
ofrecen packs en los que los componentes van "equilibrados" y que
incluyen todo lo necesario para montar el piloto automático
incluyendo el sensor magnético, el computador de navegación y la
unidad de potencia. Raymarine en sus Evo2 o por ejemplo los Simrad
AP24 o AP28 incluyen también la pantalla LCD de control del piloto
automático sin la cual no podríamos manejar el sistema.
Estas pantallas
de control son estancas para poder ser montadas al exterior y se
entienden con el resto del sistema por NMEA2000, o bien por Seatalk
o SimNet, dependiendo del fabricante.
Artículos relacionados:
-
El piloto automático
-
Piloto automático Inboard
-
Pilotos automáticos inteligentes